سیستمهای رباتیک دارای ویژگیهایی از دنیای واقعی هستند، مثل اینکه اجسام فیزیکی به طور نرم و پیوسته در فضا حرکت میکنند (معمولا با چرخ)، و نه به شکلی که نمونه های GPS نشان میدهند. به علاوه، گاهی سنسور یا سیستمی که همیشه مقادیر خوب و قابل اطمینانی میداد، ناگهان شروع به نشان دادن مقادیری میکند که صحیح و قابل باور نیست؛ مانند حالتی که در حین استفاده از GPS وارد تونل میشوید. در این حالتها، ضریب اطمینان سنسورها کاهش مییابد تا زمانی که دوباره شروع به نشان دادن اندازهگیریهای درست نماید.
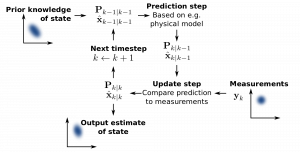
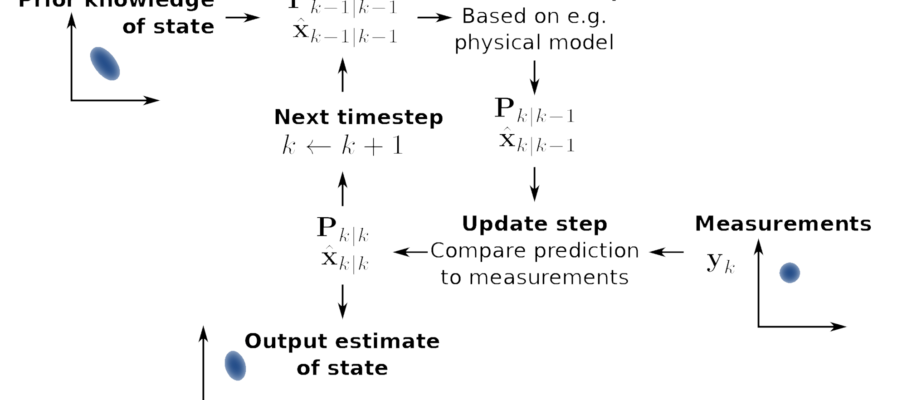
فیلتر کلمن الگوریتمی به مراتب بهتر از یک میانگینگیری یا انتخاب کردن ساده است، چون میتواند با وجود دادههای اشتباه بیشتر سنسورها – تا زمانی که حداقل یکی از آنها دادهی درست بدهد – کار کند. این فیلتر در واقع کاربردی از مفاهیم کلیتری مثل زنجیرهی مارکوف (Markov Chains) و تداخل بیزی (Bayesian Inference) بوده و یک سیستم ریاضی است که در هر مرحلهی اجرا، حدسهای زده شده را با استفاده از شواهد اصلاح میکند. مراحل این الگوریتم به صورت زیر است:
براساس مدلهای ریاضی و حالت اولیه، تخمین جدیدی از حالتها در t1 پیشبینی میشود. میزان عدم قطعیت این پیشبینی با استفاده از عدم قطعیت اولیه و میزان دقت مدل (نویز پروسه) محاسبه میشود.
پیشبینیها و بروزرسانیها هر بار که دادهی جدیدی به دست می آید، تکرار میشوند.
برای استفاده از IMU در جهتیابی، با استفاده از مدل سیستم و دادههای سرعت زاویهای، حدسها درمرحلهی پیشبینی زده میشوند، سپس با مدل قسمتِ تصحیح و با استفاده از دادههای شتابسنج و مغناطیسسنج، این حدسها بهبود مییابند.
 15 آگوست 2020
15 آگوست 2020
در سالهای اخیر پرندههای چهارملخ (کوادکوپتر)در مقایسه با سایر پرندههای دیگر از قبیل تری-کوپتر، هگزاکوپتر، اوکتاکوپتر و سایر بالگردها و حتی هواپیماهای بیسرنشین مورد توجه بیشتری واقع شده است. دلیل عمده این توجه سادگی دینامیک پرواز در مقایسه با پرندههای که از ملخهای کمتر و یا بیشتر از چهار عدد استفاده شده و همچنین قابلیت مانورهای بیشتر در مقایسه با هواپیماها به یکدیگر متصل شدهاند.